
Linear
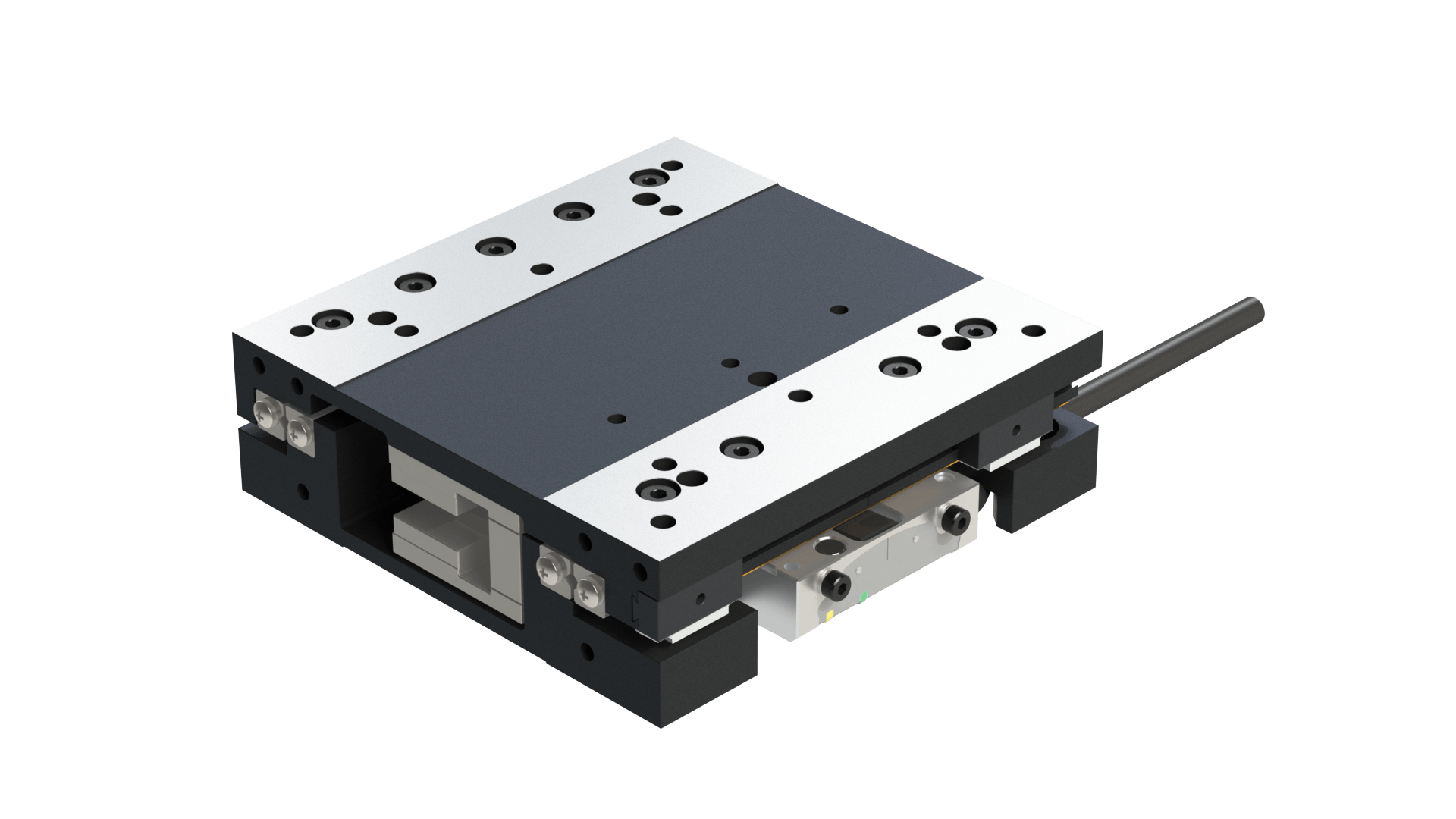
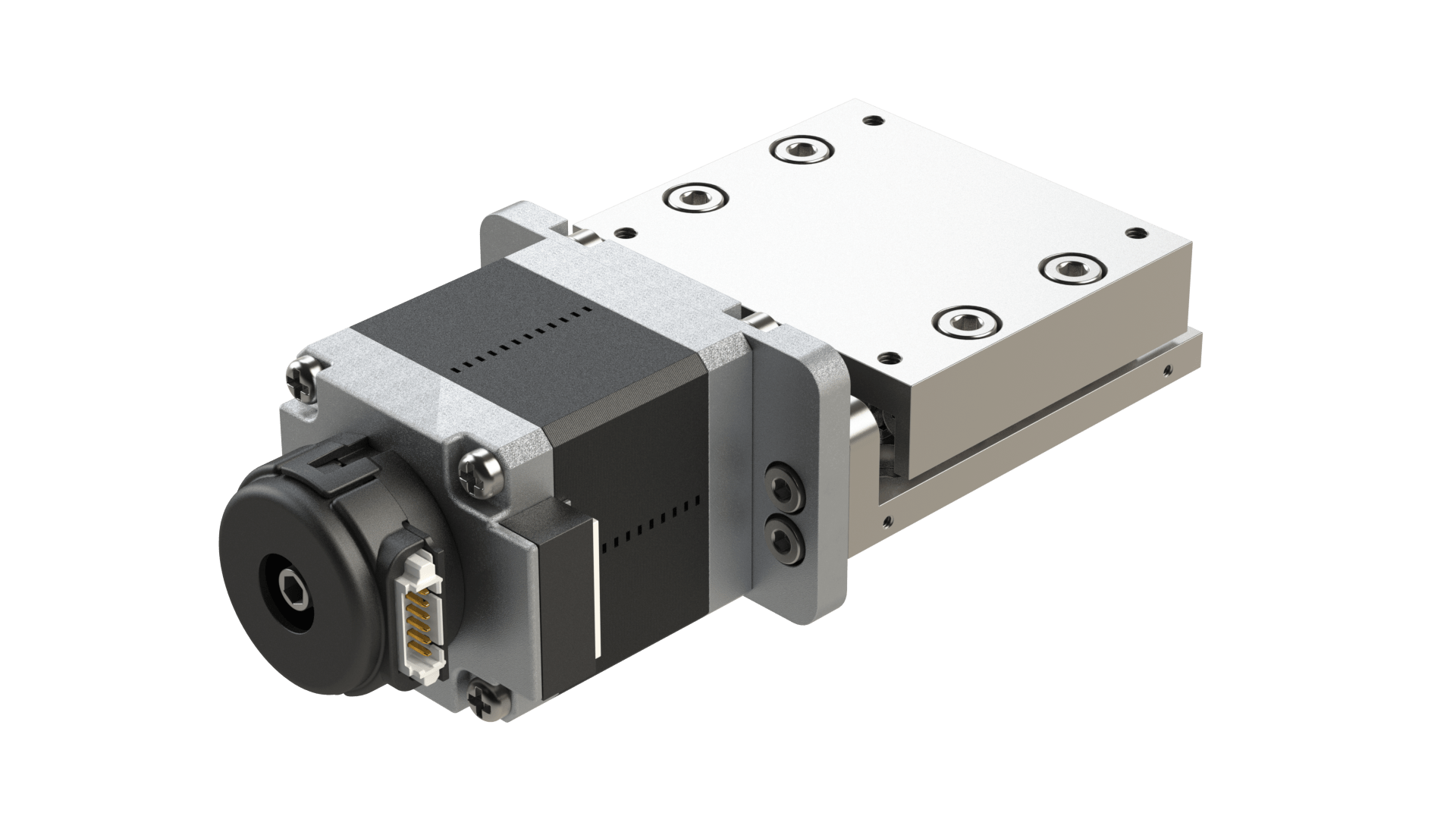
Linear stages are mechanical or electromechanical devices designed to provide controlled and precise linear motion in one dimension along a straight path. They are commonly used in applications requiring accurate positioning, including semiconductor manufacturing, laser cutting and engraving, 3D printing, scientific research, and quality control processes. They are also used in systems that require automated sample handling and precise positioning, such as in microscopy and medical devices.
Linear stages use guiding mechanisms to ensure smooth and precise motion. Common guiding mechanisms include linear ball bearings, crossed roller bearings, and air bearings. The stages are known for their high precision and accuracy. They are capable of sub-micron or sub-millimeter positioning, making them suitable for tasks where exact positioning is critical.
Linear stages come in various load capacities, ranging from a few grams to several tons. The load capacity is important when selecting a linear stage to ensure it can support the intended application. Linear stages use different drive mechanisms to achieve motion, including ball screws, lead screws, linear motors, piezoelectric actuators, and air bearings. The choice of drive mechanism depends on factors such as speed, precision, and load capacity. The cost can vary widely depending on factors like travel range, precision, load capacity, and drive mechanism. High-precision stages with long travel ranges tend to be more expensive.
Most linear stages incorporate feedback systems, such as encoders, resolvers, or linear scales, to provide accurate position feedback. These systems enable closed-loop control and help maintain precise positioning.
Our stages offer high performance for a wide variety of applications. Stepper motor stages with ball screws or lead screws are often used in positioning applications due to their high stiffness. Linear motor stages are preferred when higher speeds and accelerations are required. All stages are designed and built in our Middleton, WI, and Irvine, CA facilities.
The products can be customized for clean room, vacuums, and harsh environments with options in materials, coatings, and grease types. Our in-house manufacturing capabilities enable us to easily customize our offerings to meet space constraints and performance requirements. Our team focuses on partnering with OEM customers to provide application-specific, optimized solutions.
Linear stages are crucial tools in industries and research fields requiring precise linear motion. They enable automation, reduce human error, and improve efficiency in tasks that demand high levels of precision and repeatability.
Multi-axis configurations are also available. Motion controllers and drives are available in bench-top and OEM configurations.